# kmeans 군집을 결정하기 위한 엘보우 방법
a = []
for k in range(2, 7) :
kmeans = KMeans(n_clusters=k,init='k-means++', max_iter=300, random_state=42)
# df_scaled는 정제된 데이터
kmeans.fit_predict(df_scaled)
a.append(kmeans.inertia_)
plt.plot(range(2,7), a)
plt.show()
코드를 실행해서, 위와 같은 결과물을 얻을 수 있었는데요!
3인 구간에서 완만하게 꺾이기 때문에, 제가 가진 데이터의 적절한 군집은 3이라는 것을 알 수 있습니다.
엘보우 방법으로 적절한 K를 구했다면, KMeans를 바로 실행할 수 있습니다.
KMeans를 실행하는 코드는 아래와 같습니다.
# 엘보우를 통해서 3개의 군집 적용
kmeans = KMeans(n_clusters=3,init='k-means++', max_iter=300, random_state=42
# df_tsne는 차원 축소까지 끝난 데이터
k_clusters = kmeans.fit_predict(df_tsne)
# 군집 시각화
plt.figure(figsize=(8, 6))
sns.scatterplot(x=df_tsne[:, 0], y=df_tsne[:, 1], hue=k_clusters, palette='viridis', s=100)
plt.show()
KMeans 알고리즘을 통해 군집이 잘 분류된 것을 보실 수 있습니다:)
728x90
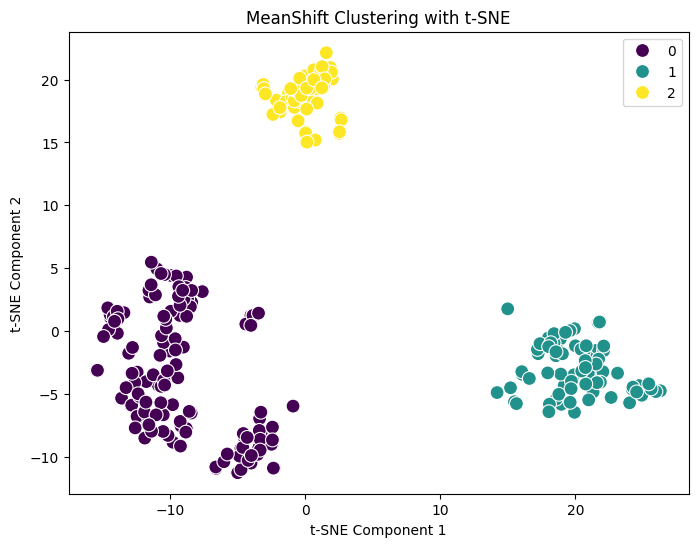
Mean Shift
군집을 자동으로 결정해주는 알고리즘으로, 데이터가 밀집된 방향으로 중심을 이동시키며 군집을 형성합니다.
군집을 미리 알 필요는 없지만, 계산량이 많고 고차원 데이터는 부적합한 경향이 있습니다!
요즘은 차원 축소도 많이 하고, 컴퓨터가 좋아서 계산량이 많아 느리다는 체감은 잘 못했어요.
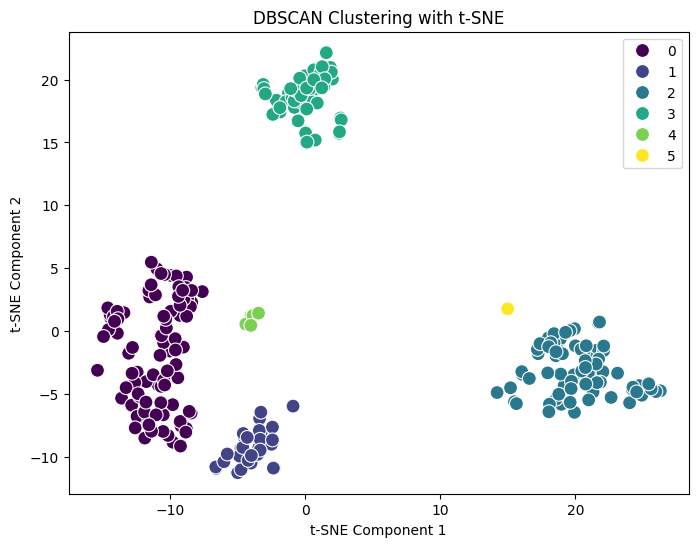
다만 같은 데이터로도, DBSCAN은 너무 세부적으로 분류하여 군집이 많이 생성된 것을 보실 수 있습니다!
SMALL
알고리즘 평가
알고리즘을 적용했으면, 어떤 알고리즘이 잘 적용이 된 것인지 확인할 필요가 있습니다.
이 때 사용하는 것이 바로 실루엣 점수입니다.
실루엣 점수
실루엣 점수는 각 데이터가 자기 군집 안에서는 얼마나 가까이 있고, 다른 군집과는 얼마나 멀리 떨어져 있는지를 수치로 나타낸 지표입니다.
값의 범위는 -1에서 1사이로, 1에 가까울수록 군집이 잘 분리된 것인데요.
일반적으로는 0.5를 넘으면 군집이 잘 만들어진 것이고, 0.25미만이면 잘 안된 것이라고 판단합니다.
실루엣 점수를 확인하는 코드는 아래와 같습니다.
# k_clusters는 KMeans 군집 분석 결과
silhouette_avg = silhouette_score(df_tsne, k_clusters)
# mean_clusters는 Mean Shift 군집 분석 결과
silhouette_avg = silhouette_score(df_tsne, mean_clusters)
# gmm_clusters는 GMM 군집 분석 결과
silhouette_avg = silhouette_score(df_tsne, gmm_clusters)
# dbscan_clusters는 DBSCAN 군집 분석 결과
silhouette_avg = silhouette_score(df_tsne, dbscan_clusters)
저는 실루엣 점수를 확인해보니, KMeans, Mean Shift, GMM 모두 동일하게 0.76이 나왔고, DBSCAN만 0.47이 나왔습니다.
비슷한 특성을 그룹으로 나누기 때문에 그룹으로 나누고자 하는 좋은 특정을 골라주는 작업이 정말 중요한데요!
이 과정을 피처(Feature) 선정이라고 합니다.
피처는 각 데이터를 설명해주는 변수들로, 고객 데이터에서 나이, 연봉, 방문 횟수 같은 것을 의미합니다.
불필요한 피처는 군집을 흐리게 만들거나, 의도하지 않은 방향으로 군집을 만들기도 합니다.
또한, 중복된 피처 정보는 모델에 부담을 주기도 하기 때문에 불필요한 피처를 버리는 과정이 정말 중요해요!
피처 선정 기준
피처를 선정할 때는 보통 아래 3가지 방법을 사용합니다.
분산 기반 (Variance)
상관 계수 기반 (Correlation)
정보 이득 기반 (Information Gain)
분산 기반 (Variance)
분산은 피처가 얼마나 많은 변동성을 가지는지를 나타내기 때문에, 변동성이 거의 없는 피처는 군집에 영향이 없다고 볼 수 있어요!
분산이 거의 없는 피처를 제거함으로써 모델에 부담을 줄이고, 조금 더 명확한 군집을 생성할 수 있도록 할 수 있습니다.
일반적으로는 0.01 이하 피처는 거의 변동이 없다고 생각할 수 있습니다.
전체 피처 중 하위 5% 또는 10%에 해당하는 분산을 가진 피처를 제거하는 방법도 있기 때문에, 분산 조절은 상황에 맞게 하시면 됩니다:)
0.01 이하의 분산을 제거하는 코드는 아래와 같습니다.
# VarianceThreshold 적용
selector = VarianceThreshold(threshold=0.01)
# features: 피처가 들어있는 데이터 프레임
selector.fit(features)
# 선택된 피처의 인덱스와 이름 추출
selected_features = features.columns[selector.get_support()]
# 제거된 피처 확인
#removed_features = data.columns[~selector.get_support()]
reduced_data = pd.DataFrame(selector.transform(features), columns=selected_features)
728x90
상관 계수 기반 (Correlation)
상관 계수는 서로 얼마나 유사한지를 나타내기 때문에, 상관 계수가 높은 피처들은 서로 중복된 정보라고 볼 수 있어요!
상관 계수가 높은 피처 중 하나를 제거하여 중복성을 줄이고, 모델에 부담을 줄일 수 있습니다.
상관 계수를 계산하고, 제거하는 코드는 아래와 같습니다.
저는 csv 파일로 만들어서 제거하는게, 더 빨라서 그렇게 했어요ㅎㅎ
# 상관 행렬 계산
corr_matrix = reduced_data.corr().abs()
# 상관 계수가 높은 피처 중복 제거
upper = corr_matrix.where(np.triu(np.ones(corr_matrix.shape), k=1).astype(np.bool))
# csv 파일을 통해 확인하고 직접 제거
upper.to_csv('상관 계수.csv')
정보 이득 기반 (Information Gain)
정보 이득은 서로 상호 의존성을 측정하는 방법으로, 값이 높을수록 해당 피처가 다른 피처들과 유의미한 상호작용을 갖는다는 것을 의미합니다.
유의미하지 못한 피처들을 제거하여 조금 더 명확한 군집을 생성할 수 있어요!
일반적으로 0.3 이상의 값을 가져야, 중요도가 높다고 해석할 수 있습니다.
0.1 미만의 값은 거의 기여하지 않는다고 볼 수 있고, 그 사이 값들은 중요도가 낮다고 볼 수 있어요.
어느 점수에서 피처를 제거할지는 상황에 맞게 하시면 됩니다:)
kmeans 알고리즘 적용 후, 정보 이득 점수에 따라 피처를 제거하는 코드는 아래와 같습니다!
kmeans 알고리즘 외 다른 군집 분석 알고리즘을 사용하셔도 좋습니다ദ്ദിㆁᴗㆁ✿)
# KMeans를 위한 데이터 정제
# 데이터 정규화 또는 표준화
scaler = StandardScaler()
df_scaled = scaler.fit_transform(data)
# KMeans 적용
kmeans = KMeans(n_clusters=3,init='k-means++', max_iter=300, random_state=42)
clusters = kmeans.fit_predict(df_scaled)
# 피처 이름과 중요도를 함께 저장
feature_importance_df = pd.DataFrame({
'Feature': data.columns,
'Importance': mi_scores
})
# 중요도에 따라 정렬
# 해당 값을 직접 확인해서 컬럼 제거
feature_importance_df = feature_importance_df.sort_values(by='Importance', ascending=False)
SMALL
차원 축소
데이터에서 차원은 피처의 개수를 의미하는데, 차원이 높을수록 여러 가지 문제가 발생합니다ㅠㅠ
대표적으로는 계산량이 증가되고, 알고리즘 성능이 떨어지며, 시각화가 어렵다는 문제가 있는데요!
이를 방지하기 하기 위해 원래 데이터의 주요 정보를 최대한 보존하면서 변수(차원)의 수를 줄이는 방법을 차원 축소하고 합니다.
차원 축소의 대표적인 알고리즘은 PCA와 t-SNE가 있는데, 요즘은 t-SNE를 더 자주 사용한다고 하네요:)
차원 축소를 할 때는 어떤 차원으로 축소 가능하지만, 보통 시각화를 위해서 2차원이나 3차원으로 축소를 합니다!
그리고 차원 축소가 불필요한 중복을 추가로 제거해주기 때문에, 알고리즘 적용 전에 하시는게 더 좋습니다.
t-SNE 알고리즘으로 2차원 축소하는 코드는 아래와 같습니다.
코드 자체는 정말 단순하네요ㅋㅋㅋㅋ
# TSNE를 활용하여 차원 축소 진행
tsne = TSNE(n_components=2, random_state=42, perplexity=30)
df_tsne = tsne.fit_transform(df_scaled)
차원 축소를 하시고, 알고리즘을 적용하면 아래 처럼 수월하게 시각화를 진행할 수 있어요:D
여기까지가 군집 분석을 위한 피처 선정과 차원 축소에 관련된 내용이었습니다.
군집 분석은 불필요한 정보를 많이 포함할 수록 기능이 상당히 떨어지기 때문에 전처리하는 과정이 정말 중요합니다ㅠㅠ
저도 군집 분석하면서 전처리하는게 가장 힘들었어요...ㅎㅎ
KMeans, GMM 같은 군집 알고리즘 비교와 알고리즘을 평가하는 방법은 아래 링크를 확인해주세요!
import numpy as np
import matplotlib.pyplot as plt
# 데이터 생성
x = np.linspace(0, 10, 100)
y = np.sin(x)
plt.xlabel("X-axis")
plt.ylabel("Y-axis")
plt.title("Title")
plt.plot(x, y)
위치 변경하기
x축, y축, 제목은 모두 위치를 변경할 수 있습니다.
위치는 두 가지 방법으로 옮길 수 있습니다.
1. pad를 사용하여 간격을 조절
import numpy as np
import matplotlib.pyplot as plt
# 데이터 생성
x = np.linspace(0, 10, 100)
y = np.sin(x)
plt.xlabel("X-axis", labelpad=40)
plt.ylabel("Y-axis", labelpad= 30)
plt.title("Title", pad=30)
plt.plot(x, y)
각 축과 제목의 간격이 멀어지신게 보이시나요?
pad 내 숫자가 커질수록 그래프와 축/제목 사이의 간격을 멀게 설정할 수 있습니다.
ㄴ
2. 좌표를 설정하여 위치를 조절
제목은 좌표를 설정해서 위치를 조절할 수 있습니다!
축의 경우에도 동일하게 좌표 설정을 할 수 있는데, 좌표대로 잘 움직이지 않아 거의 사용하지 않습니다ㅠㅠ
import numpy as np
import matplotlib.pyplot as plt
# 데이터 생성
x = np.linspace(0, 10, 100)
y = np.sin(x)
fig, ax = plt.subplots(figsize=(6, 4))
# 글씨 크기 조절 가능
plt.xlabel("X-axis", fontsize=14)
plt.ylabel("Y-axis", fontsize=14)
ax.set_title("Title", fontsize=14, x=0.8, y=1.05)
plt.plot(x, y)
제목의 위치가 변경되신게 보이시나요?
x는 좌우의 위치를, y는 상하의 위치를 변경할 수 있습니다!
범례 설정하기
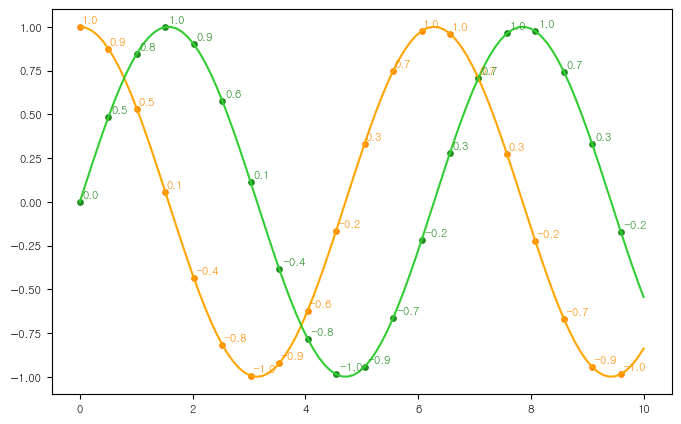
범례란?
범례는 지도나 차트 등에서 참고하라는 뜻으로 나타낸 정보입니다.
파이썬 시각화에서는 보통 각 그래프가 어떤 것을 나타내는지 표기할 때 많이 사용합니다!
아래 그래프처럼 노란색과 연두색이 각각 어떤 그래프를 나타내는지 아래쪽에 표기된 것이 범례입니다.
범례 생성하기
보통 범례는 자동으로 생성되는 경우가 많은데, 그래프를 각각 그릴 경우에는 범례가 생성되지 않습니다.
이 때 직접 범례를 설정하는 것도 가능합니다.
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
# 데이터 생성
x = np.linspace(0, 10, 100)
y = np.cos(x)
y1 = np.sin(x)
line1, = plt.plot(x, y, color='lightskyblue')
line2, = plt.plot(x, y1, color='lightcoral')
# 범례 직접 설정
plt.legend(handles=[line1, line2], labels=["Cos(x)", "Sin(x)"])
plt.xlabel("X-axis")
plt.ylabel("Y-axis")
plt.title("Legend Example")
plt.show()
plt.legend(handles=[line1, line2], labels=["Cos(x)", "Sin(x)"]) 여기서 loc = 옵션을 추가하게 되면 범례의 위치를 어느 정도 조정할 수 있습니다!
예를 들어 upper right 옵션으로 하게 되면, 오른쪽 위에 범례가 생성되는데요, 옵션을 정하지 않으면 가장 적당한 위치에 알아서 생성이 됩니다.
ㄷ
위치 변경하기
위의 사진처럼 범례가 자동으로 생성될 때 그래프를 가리는 경우를 자주 접하실 수 있는데요!
이 때 범례 위치를 변경하는 코드는 알아두시면 유용합니다:)
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
# 데이터 생성
x = np.linspace(0, 10, 100)
y = np.cos(x)
y1 = np.sin(x)
line1, = plt.plot(x, y, color='lightskyblue')
line2, = plt.plot(x, y1, color='lightcoral')
# 범례 직접 설정
plt.legend(handles=[line1, line2], labels=["Cos(x)", "Sin(x)"], loc='lower right', bbox_to_anchor=(0.81, 0.03))
plt.xlabel("X-axis")
plt.ylabel("Y-axis")
plt.title("Legend Example")
plt.show()
범례의 위치가 변경된 게 보이시나요?
지금은 예쁘게 옮긴 건 아니지만, 범례를 자유롭게 움직일 수 있는 것은 굉장히 편리하니 잘 사용해주세요!
먼저 loc 옵션을 조정하여 큰 틀의 위치를 정해주시고, bbox_to_anchor 내 좌표로 세세한 위치를 조정해주시면 됩니다:)
한글 설정하기
마지막으로 각 축, 제목, 범례를 한글로 정하는 방법에 대해서 알려드리겠습니다!
보통 한글로 설정을 하게 되면 아래 사진처럼 한글이 깨져서 나오기 때문에 한글 설정이 먼저 필요합니다.
한글 설정을 위해서는 먼저 한글 폰트를 찾아야 합니다.
C:\Windows\Fonts 해당 경로로 가시면, 컴퓨터에 설치되어 있는 폰트를 보실 수 있습니다!
이제 저희가 사용하고 싶은 폰트를 고르면 되는데, 아쉽게도 모든 폰트를 지원하지는 않습니다ㅠㅠ
파이썬은 바탕, 굴림, 궁서체 중 골라서 사용하시는게 안전합니다:) (그래도 이것저것 해보시는 걸 추천 드려요)
위의 글씨체 중 하나를 골라 마우스 오른쪽 클릭→속성→이름 복사를 하시면 되는데, 이름은 .ttc 앞까지만 복사해주세요!
※ 만약에 속성이 나타나지 않는다면, 폰트를 더블 클릭해서 들어가신 다음 진행하시면 됩니다.
간혹 HY시리즈는 이름 그대로를 사용하셔야 되는 경우도 있습니다.
예를 들면 HYPost의 경우 HYPost-Medium, HY고딕의 경우 HYGothic-Medium을 사용합니다.
ㄹ
이제 아래 코드를 실행하시게 되면 한글 지원이 가능합니다.
plt.rcParams['font.family'] = 'HYPost-Medium'
이제 한글로 잘 보이는 걸 알 수 있습니다!!
하지만 한글로 변경할 때는 종종 숫자의 마이너스가 깨지는 경우가 있어요ㅠㅠ
해당 경우는 마이너스가 지원되는 한글을 써야하는데, 저는 보통 굴림을 사용합니다.
plt.rcParams['font.family'] = 'gulim'
이제 한글과 마이너스가 모두 잘 보이는 것을 확인할 수 있습니다!
여기까지 축, 제목, 범례 활용을 정리해보았습니다!
이것저것 쓰다보니 꽤 길어졌는데요, 시각화는 예쁘면 예쁠수록 도움이 되기 때문에 세세한 부분이라도 잘 활용하시면 좋을 것 같습니다:)
특히 한글 설정 같은 경우, 글씨체가 이쁘면 보기도 좋으니 여러 폰트로 한 번 사용해보시길 추천드려요ദ്ദി・ᴗ・)✧
안녕하세요! 오늘은 파이썬으로 하는 시각화 활용 Line plot에 대해 포스팅 하려고 합니다.
Line plot이란?
시간이나 연속적인 값을 나타낼 때 사용되는 그래프로, 일반적인 선 그래프 입니다.
보통 x축에는 연속적인 변수를 y축에는 수치형 데이터를 배치해서 사용하는 경우가 일반적입니다.
저는 보통 식을 그릴 때는 matplotlib, 데이터 프레임이 있는 경우에는 seaborn, matplotlib 두 개를 함께 사용해서 line plot을 그립니다.
matplotlib로 단일 그래프 그리기
우선 먼저 matplotlib를 사용해서 간단한 그래프를 그려보겠습니다.
아래처럼 숫자를 직접 입력하거나, 특정 식이 존재한다면 matplotlib만 사용해서 그리는 것이 간단합니다!
import matplotlib.pyplot as plt
# 왼쪽이 x 값, 오른쪽이 y 값
plt.plot([1, 2, 3, 4], [2, 3, 5, 10])
plt.show()
import numpy as np
import matplotlib.pyplot as plt
# 데이터 생성
x = np.linspace(0, 10, 100)
y = np.sin(x)
plt.plot(x, y)
plt.show()
seaborn을 함께 사용하여 단일 그래프 그리기
seaborn은 데이터 프레임과 호환성이 좋기 때문에 보통 데이터 프레임으로 사용합니다.
import numpy as np
import pandas as pd
import seaborn as sns
import matplotlib.pyplot as plt
# 데이터 생성
x = np.linspace(0, 10, 100)
y = np.cos(x)
df = pd.DataFrame({"X": x, "Y": y})
sns.lineplot(x="X", y="Y", data=df)
그래프 커스텀 하기
사실 그래프를 그리는 것은 정말 간단합니다!
하지만 그래프를 단순히 그리는 것과 이를 커스텀해서 사용하는 것은 정말 큰 차이가 있습니다.
학습이 진행 중인policy_net에서 행동을 선택할 경우,학습이 불안정할 가능성이 높아 target_net에서 진행하는 것이 더 좋습니다.
2. 확률로 행동 선택하기
해당 방법은Q값을 확률로 변경한 다음,확률대로 행동을 선택하게 하는 것을 의미합니다.
이 방법을 사용할 경우, 확률적으로 행동을 선택하기 때문에어느 정도 학습이 진행되어도 탐험을 보장한다는 것과 ϵ을 따로 세팅해주지 않아도 되는 것이 장점이라고 볼 수 있습니다!
확률로 행동을 선택하는 코드는 아래와 같습니다.
def select_action(state, target_net, action_dim):
q_value = target_net(state)
# Q 값을 확률 값으로 바꾸는 과정
p = F.softmax(q_value, dim=0).tolist()
# 부동소수점 오차로 인해 합이 1이 안되는 문제 해결
p = np.array(p)
p /= p.sum()
action = np.random.choice(action_dim, p=p)
return action
DDQN 공식을 사용해서 업데이트
이제 DDQN 공식을 사용해서 네트워크를 업데이트 하는 것을 구현해보도록 하겠습니다.
코드로 들어가지 전에 먼저DDQN 공식을 먼저 살펴보겠습니다.
기본적으로는 DQN과 비슷한 공식입니다!
DQN과 Q가 두 번 사용된 것을 보실 수 있습니다.
DQN과 마찬가지로 DDQN은 딥러닝을 사용하기 때문에 자체적으로옵티마이저와 learning rate가 들어가게 됩니다.
이두 개가 DDQN의 α로 작용을 하기 때문에 실제로 사용하는공식에는 α가 사라져아래와 같은 공식이 됩니다!
θ와 θ ̄ 는 α 대신 네트워크가 작동하는 부분이라고 생각하시면 됩니다.
이제 해당 공식을 바탕으로 DDQN을 진행하는 코드는 아래와 같습니다.
def optimize_model(memory, policy_net, target_net, optimizer):
# batch_size만큼 데이터가 메모리에 쌓였을 때만 학습 진행
if len(memory) < batch_size:
return
# transitions = (state, action, reward, next_state, done)
transitions = memory.sample(batch_size)
# state, action, reward, next_state, done을 각각 묶어서 list의 형태로 만드는 작업
batch = list(zip(*transitions))
state_batch = torch.stack(batch[0])
action_batch = torch.tensor(batch[1]).unsqueeze(1)
reward_batch = torch.tensor(batch[2])
next_state_batch = torch.stack(batch[3])
done_batch = torch.tensor(batch[4], dtype=torch.float32)
# DDQN
q_values = policy_net(state_batch).gather(1, action_batch)
next_action = policy_net(next_state_batch).argmax(1).unsqueeze(1)
next_q_values = target_net(next_state_batch).gather(1, next_action).squeeze().detach()
# (1-done_batch)을 통해 에피소드가 끝났는지 아닌지를 판단
target_q_values = reward_batch + (gamma * next_q_values * (1 - done_batch))
loss = nn.MSELoss()(q_values.squeeze(), target_q_values)
optimizer.zero_grad()
loss.backward()
optimizer.step()
policy_net에서 가져온 next_action을 바탕으로 target_net에서 next_q_values 값을 구하고 있습니다.
이처럼 policy_net, target_net 두 가지에서 가져온 값으로 계산을 진행하기 때문에 Double Deep Q-Network가 된 것입니다.
모델 학습
이제 본격적으로 학습을 진행해보도록 하겠습니다.
한 가지 중요한 점은 Cart Pole 환경이500점을 달성해도,에피소드 완료라고 판단하지 않기때문에 저희가직접 판단해줘야 합니다.
학습을 진행하는 코드는 아래와 같습니다.
# 초기 세팅
policy_net = DDQN(state_dim, action_dim)
target_net = DDQN(state_dim, action_dim)
target_net.load_state_dict(policy_net.state_dict())
target_net.eval()
optimizer = optim.Adam(policy_net.parameters(), lr=learning_rate)
memory = ReplayMemory(memory_size)
# epsilon-greedy 방법으로 행동을 선택할 때 필요
# epsilon = epsilon_start
episode_rewards = []
episode_reward = 0
save_dir = "dqn_saved_models"
os.makedirs(save_dir, exist_ok=True)
# 모델 학습
for episode in range(episodes):
state = torch.tensor(env.reset()[0], dtype=torch.float32)
if episode % 1000 == 0:
print(f"Episode {episode}, Avg Reward: {episode_reward/1000}")
if episode % 1000 == 0 :
episode_reward = 0
total_reward = 0
# 500 초과인 경우는 done으로 판단
while total_reward < 501 :
action = select_action(state, target_net, action_dim)
next_state, reward, done, _, _ = env.step(action)
next_state = torch.tensor(next_state, dtype=torch.float32)
memory.push((state, action, reward, next_state, done))
state = next_state
total_reward += reward
optimize_model(memory, policy_net, target_net, optimizer)
if done :
break
# 500점 달성한 모델 저장
if total_reward >= 500 :
model_path = os.path.join(save_dir, f"dqn_model_episode_{episode}.pth")
torch.save(policy_net.state_dict(), model_path)
episode_reward += total_reward
# epsilon-greedy로 action을 선택할 때는 있어야 함
# if episode % 10 == 0 :
# epsilon = max(epsilon_end, epsilon*epsilon_decay)
if episode % 20 == 0:
target_net.load_state_dict(policy_net.state_dict())
episode_rewards.append(total_reward)
리워드 시각화 및 모델 테스트
마지막으로 저희가 학습한 모델이 잘 학습되었는지 확인하기 위해, 리워드를 시각화하고 모델을 테스트해보겠습니다.
먼저리워드 시각화하는 코드는 아래와 같습니다
plt.plot(episode_rewards)
plt.xlabel('Episode')
plt.ylabel('Total Reward')
plt.title('DQN on CartPole')
plt.show()
저는 위와 같은 결과 값이 나왔는데요, 한결 같은 값을 가지는 것은 아니지만전체적으로 점점 리워드가 상승하는 것을 볼 수 있습니다.
이처럼 여러분의 리워드도전체적으로 상승하는 형상을 보이고 있다면,학습이 잘 된 것으로 보실 수 있습니다.
다음은모델 테스트를 진행해보겠습니다.
저는 모든 모델을 테스트 한 것은 아니도,500점 이상을 달성한 모델만 따로 저장하여 모델 테스트를 진행해보았습니다.
리워드 그래프에서도 보셨듯, 전체적으로 리워드가 상승하는 것이지모든 모델이 좋은 모델이라고는 볼 수 없기 때문에 최대치의 리워드를 달성한 모델로 테스트를 진행하였어요!
모델 테스트를 진행하는 코드는 아래와 같습니다.
# 테스트 시, render 활성화 필요
env = gym.make("CartPole-v1", render_mode='human')
# 500 달성한 모델 업로드
model_paths = glob.glob(os.path.join(save_dir, "*.pth"))
model_i = 0
for model_path in model_paths :
policy_net.load_state_dict(torch.load(model_path))
policy_net.eval()
avg_reward = 0
# 각 모델 별 10번 진행
for episode in range(10) :
state = torch.tensor(env.reset()[0], dtype=torch.float32)
total_reward = 0
while total_reward < 501 :
with torch.no_grad() :
action = policy_net(state).argmax().item()
next_state, reward, done, _, _ = env.step(action)
next_state = torch.tensor(next_state, dtype=torch.float32)
state = next_state
total_reward += reward
if done :
break
avg_reward += total_reward
print(f"model {model_i + 1}, Avg Reward: {avg_reward/10}")
model_i += 1
특정 모델은 500점 리워드를 달성하지 못하는 경우도 있었지만, 대부분은 500점 이상을 달성하는 것을 볼 수 있었습니다.
모델마다 다른 방식으로 500점을 달성하는데, 한 번 구경해보시는 것도 좋을 것 같아요!
전체 코드
import gymnasium as gym
import torch
import torch.nn as nn
import torch.optim as optim
import random
import numpy as np
from collections import deque
import matplotlib.pyplot as plt
import os
import glob
import torch.nn.functional as F
# 하이퍼 파라미터
gamma = 0.99
learning_rate = 0.0005
batch_size = 100
memory_size = 5000
episodes = 5000
# ϵ-greedy 사용 시, 필요
# epsilon_start = 1.0
# epsilon_end = 0.001
# epsilon_decay = 0.995
class DDQN(nn.Module):
def __init__(self, state_dim, action_dim):
super(DQN, self).__init__()
self.fc1 = nn.Linear(state_dim, 32)
self.fc2 = nn.Linear(32, 32)
self.fc3 = nn.Linear(32, action_dim)
def forward(self, x):
x = torch.relu(self.fc1(x))
x = torch.relu(self.fc2(x))
x = self.fc3(x)
return x
class ReplayMemory:
def __init__(self, capacity):
self.memory = deque(maxlen=capacity)
def push(self, transition):
self.memory.append(transition)
def sample(self, batch_size):
return random.sample(self.memory, batch_size)
def __len__(self):
return len(self.memory)
def select_action(state, target_net, action_dim):
# ϵ-greedy
# if random.random() < epsilon:
# return random.randint(0, action_dim - 1)
# else:
# return target_net(state).argmax().item()
q_value = target_net(state)
p = F.softmax(q_value, dim=0).tolist()
p = np.array(p)
p /= p.sum()
action = np.random.choice(action_dim, p=p)
return action
def optimize_model(memory, policy_net, target_net, optimizer):
if len(memory) < batch_size:
return
transitions = memory.sample(batch_size)
batch = list(zip(*transitions))
state_batch = torch.stack(batch[0])
action_batch = torch.tensor(batch[1]).unsqueeze(1)
reward_batch = torch.tensor(batch[2])
next_state_batch = torch.stack(batch[3])
done_batch = torch.tensor(batch[4], dtype=torch.float32)
q_values = policy_net(state_batch).gather(1, action_batch)
next_action = policy_net(next_state_batch).argmax(1).unsqueeze(1)
next_q_values = target_net(next_state_batch).gather(1, next_action).squeeze().detach()
target_q_values = reward_batch + (gamma * next_q_values * (1 - done_batch))
loss = nn.MSELoss()(q_values.squeeze(), target_q_values)
optimizer.zero_grad()
loss.backward()
optimizer.step()
env = gym.make("CartPole-v1")
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
policy_net = DDQN(state_dim, action_dim)
target_net = DDQN(state_dim, action_dim)
target_net.load_state_dict(policy_net.state_dict())
target_net.eval()
optimizer = optim.Adam(policy_net.parameters(), lr=learning_rate)
memory = ReplayMemory(memory_size)
# epsilon = epsilon_start
episode_rewards = []
episode_reward = 0
save_dir = "dqn_saved_models"
os.makedirs(save_dir, exist_ok=True)
for episode in range(episodes):
state = torch.tensor(env.reset()[0], dtype=torch.float32)
if episode % 100 == 0:
print(f"Episode {episode}, Avg Reward: {episode_reward/100}")
if episode % 100 == 0 :
episode_reward = 0
total_reward = 0
# 500 초과인 경우는 done으로 판단
while total_reward < 501 :
action = select_action(state, target_net, action_dim)
next_state, reward, done, _, _ = env.step(action)
next_state = torch.tensor(next_state, dtype=torch.float32)
memory.push((state, action, reward, next_state, done))
state = next_state
total_reward += reward
optimize_model(memory, policy_net, target_net, optimizer)
if done :
break
# 500점 달성한 모델 저장
if total_reward >= 500 :
model_path = os.path.join(save_dir, f"dqn_model_episode_{episode}.pth")
torch.save(policy_net.state_dict(), model_path)
episode_reward += total_reward
# ϵ-greedy 사용 시, 필요
# if episode % 10 == 0 :
# epsilon = max(epsilon_end, epsilon*epsilon_decay)
if episode % 20 == 0:
target_net.load_state_dict(policy_net.state_dict())
episode_rewards.append(total_reward)
plt.plot(episode_rewards)
plt.xlabel('Episode')
plt.ylabel('Total Reward')
plt.title('DQN on CartPole')
plt.show()
# 테스트 진행
env = gym.make("CartPole-v1", render_mode='human')
# 500 달성한 모델 업로드
model_paths = glob.glob(os.path.join(save_dir, "*.pth"))
model_i = 0
for model_path in model_paths :
policy_net.load_state_dict(torch.load(model_path))
policy_net.eval()
avg_reward = 0
# 각 모델 별 10번 진행
for episode in range(10) :
state = torch.tensor(env.reset()[0], dtype=torch.float32)
total_reward = 0
while total_reward < 501 :
with torch.no_grad() :
action = policy_net(state).argmax().item()
next_state, reward, done, _, _ = env.step(action)
next_state = torch.tensor(next_state, dtype=torch.float32)
state = next_state
total_reward += reward
if done :
break
avg_reward += total_reward
print(f"model {model_i + 1}, Avg Reward: {avg_reward/10}")
model_i += 1
사실 cart pole 문제는 간단한 편이라서, DQN이랑 DDQN이랑 성능이 거의 차이가 나지 않았습니다!
다만 그래도 Q-Network를 두 개를 사용한다는 개념이 헷갈릴 수 있기 때문에 한 번은 구현해보시는 걸 추천드려요:)
학습이 진행 중인 policy_net에서 행동을 선택할 경우, 학습이 불안정할 가능성이 높아 target_net에서 진행하는 것이 더 좋습니다.
2. 확률로 행동 선택하기
해당 방법은 Q값을 확률로 변경한 다음, 확률대로 행동을 선택하게 하는 것을 의미합니다.
이 방법을 사용할 경우, 확률적으로 행동을 선택하기 때문에 어느 정도 학습이 진행되어도 탐험을 보장한다는 것과 ϵ을 따로 세팅해주지 않아도 되는 것이 장점이라고 볼 수 있습니다!
확률로 행동을 선택하는 코드는 아래와 같습니다.
def select_action(state, target_net, action_dim):
q_value = target_net(state)
# Q 값을 확률 값으로 바꾸는 과정
p = F.softmax(q_value, dim=0).tolist()
# 부동소수점 오차로 인해 합이 1이 안되는 문제 해결
p = np.array(p)
p /= p.sum()
action = np.random.choice(action_dim, p=p)
return action
DQN 공식을 사용해서 업데이트
이제 DQN 공식을 사용해서 네트워크를 업데이트 하는 것을 구현해보도록 하겠습니다.
코드로 들어가지 전에 먼저 DQN 공식을 먼저 살펴보겠습니다.
기본적으로는 Q-learning과 동일한 공식입니다!
하지만 DQN은 딥러닝을 사용하기 때문에 자체적으로 옵티마이저와 learning rate가 들어가게 됩니다.
이 두 개가 DQN의 α로 작용을 하기 때문에 실제로 사용하는 공식에는 α가 사라져 아래와 같은 공식이 됩니다!
θ ̄ 는 α 대신 네트워크가 작동하는 부분이라고 생각하시면 됩니다.
α를 사용하지 않기 때문에 일종의 TD 으로도 보실 수 있는데요.
TD 공식으로 변형해서 사용하셔도 문제 없이 학습하실 수 있습니다:)
이제 해당 공식을 바탕으로 DQN을 진행하는 코드는 아래와 같습니다.
def optimize_model(memory, policy_net, target_net, optimizer):
# batch_size만큼 데이터가 메모리에 쌓였을 때만 학습 진행
if len(memory) < batch_size:
return
# transitions = (state, action, reward, next_state, done)
transitions = memory.sample(batch_size)
# state, action, reward, next_state, done을 각각 묶어서 list의 형태로 만드는 작업
batch = list(zip(*transitions))
state_batch = torch.stack(batch[0])
action_batch = torch.tensor(batch[1]).unsqueeze(1)
reward_batch = torch.tensor(batch[2])
next_state_batch = torch.stack(batch[3])
done_batch = torch.tensor(batch[4], dtype=torch.float32)
# DQN
q_values = policy_net(state_batch).gather(1, action_batch)
next_q_values = target_net(next_state_batch).max(1)[0].detach()
# (1-done_batch)을 통해 에피소드가 끝났는지 아닌지를 판단
target_q_values = reward_batch + (gamma * next_q_values * (1-done_batch))
loss = nn.MSELoss()(q_values.squeeze(), target_q_values)
optimizer.zero_grad()
loss.backward()
optimizer.step()
q_values를 policy_net에서 가져오는 이유는 학습 중인 policy_net과 DQN 공식을 적용한 target_net가 비슷해지도록 학습이 되야 하기 때문입니다.
모델 학습
이제 본격적으로 학습을 진행해보도록 하겠습니다.
한 가지 중요한 점은 Cart Pole 환경이 500점을 달성해도, 에피소드 완료라고 판단하지 않기 때문에 저희가 직접 판단해줘야 합니다.
학습을 진행하는 코드는 아래와 같습니다.
# 초기 세팅
policy_net = DQN(state_dim, action_dim)
target_net = DQN(state_dim, action_dim)
target_net.load_state_dict(policy_net.state_dict())
target_net.eval()
optimizer = optim.Adam(policy_net.parameters(), lr=learning_rate)
memory = ReplayMemory(memory_size)
# epsilon-greedy 방법으로 행동을 선택할 때 필요
# epsilon = epsilon_start
episode_rewards = []
episode_reward = 0
save_dir = "dqn_saved_models"
os.makedirs(save_dir, exist_ok=True)
# 모델 학습
for episode in range(episodes):
state = torch.tensor(env.reset()[0], dtype=torch.float32)
if episode % 1000 == 0:
print(f"Episode {episode}, Avg Reward: {episode_reward/1000}")
if episode % 1000 == 0 :
episode_reward = 0
total_reward = 0
# 500 초과인 경우는 done으로 판단
while total_reward < 501 :
action = select_action(state, target_net, action_dim)
next_state, reward, done, _, _ = env.step(action)
next_state = torch.tensor(next_state, dtype=torch.float32)
memory.push((state, action, reward, next_state, done))
state = next_state
total_reward += reward
optimize_model(memory, policy_net, target_net, optimizer)
if done :
break
# 500점 달성한 모델 저장
if total_reward >= 500 :
model_path = os.path.join(save_dir, f"dqn_model_episode_{episode}.pth")
torch.save(policy_net.state_dict(), model_path)
episode_reward += total_reward
# epsilon-greedy로 action을 선택할 때는 있어야 함
# if episode % 10 == 0 :
# epsilon = max(epsilon_end, epsilon*epsilon_decay)
if episode % 20 == 0:
target_net.load_state_dict(policy_net.state_dict())
episode_rewards.append(total_reward)
리워드 시각화 및 모델 테스트
마지막으로 저희가 학습한 모델이 잘 학습되었는지 확인하기 위해, 리워드를 시각화하고 모델을 테스트해보겠습니다.
먼저 리워드 시각화 하는 코드는 아래와 같습니다.
plt.plot(episode_rewards)
plt.xlabel('Episode')
plt.ylabel('Total Reward')
plt.title('DQN on CartPole')
plt.show()
저는 위와 같은 결과 값이 나왔는데요, 한결 같은 값을 가지는 것은 아니지만 전체적으로 점점 리워드가 상승하는 것을 볼 수 있습니다.
이처럼 여러분의 리워드도 전체적으로 상승하는 형상을 보이고 있다면, 학습이 잘 된 것으로 보실 수 있습니다.
다음은 모델 테스트를 진행해보겠습니다.
저는 모든 모델을 테스트 한 것은 아니도, 500점 이상을 달성한 모델만 따로 저장하여 모델 테스트를 진행해보았습니다.
리워드 그래프에서도 보셨듯, 전체적으로 리워드가 상승하는 것이지 모든 모델이 좋은 모델이라고는 볼 수 없기 때문에 최대치의 리워드를 달성한 모델로 테스트를 진행하였어요!
모델 테스트를 진행하는 코드는 아래와 같습니다.
# 테스트 시, render 활성화 필요
env = gym.make("CartPole-v1", render_mode='human')
# 500 달성한 모델 업로드
model_paths = glob.glob(os.path.join(save_dir, "*.pth"))
model_i = 0
for model_path in model_paths :
policy_net.load_state_dict(torch.load(model_path))
policy_net.eval()
avg_reward = 0
# 각 모델 별 10번 진행
for episode in range(10) :
state = torch.tensor(env.reset()[0], dtype=torch.float32)
total_reward = 0
while total_reward < 501 :
with torch.no_grad() :
action = policy_net(state).argmax().item()
next_state, reward, done, _, _ = env.step(action)
next_state = torch.tensor(next_state, dtype=torch.float32)
state = next_state
total_reward += reward
if done :
break
avg_reward += total_reward
print(f"model {model_i + 1}, Avg Reward: {avg_reward/10}")
model_i += 1
특정 모델은 500점 리워드를 달성하지 못하는 경우도 있었지만, 대부분은 500점 이상을 달성하는 것을 볼 수 있었습니다.
모델마다 다른 방식으로 500점을 달성하는데, 한 번 구경해보시는 것도 좋을 것 같아요!
전체 코드
import gymnasium as gym
import torch
import torch.nn as nn
import torch.optim as optim
import random
import numpy as np
from collections import deque
import matplotlib.pyplot as plt
import os
import glob
import torch.nn.functional as F
# 하이퍼 파라미터
gamma = 0.99
learning_rate = 0.0005
batch_size = 100
memory_size = 5000
episodes = 5000
# ϵ-greedy 사용 시, 필요
# epsilon_start = 1.0
# epsilon_end = 0.001
# epsilon_decay = 0.995
class DQN(nn.Module):
def __init__(self, state_dim, action_dim):
super(DQN, self).__init__()
self.fc1 = nn.Linear(state_dim, 32)
self.fc2 = nn.Linear(32, 32)
self.fc3 = nn.Linear(32, action_dim)
def forward(self, x):
x = torch.relu(self.fc1(x))
x = torch.relu(self.fc2(x))
x = self.fc3(x)
return x
class ReplayMemory:
def __init__(self, capacity):
self.memory = deque(maxlen=capacity)
def push(self, transition):
self.memory.append(transition)
def sample(self, batch_size):
return random.sample(self.memory, batch_size)
def __len__(self):
return len(self.memory)
def select_action(state, target_net, action_dim):
# ϵ-greedy
# if random.random() < epsilon:
# return random.randint(0, action_dim - 1)
# else:
# return target_net(state).argmax().item()
q_value = target_net(state)
p = F.softmax(q_value, dim=0).tolist()
p = np.array(p)
p /= p.sum()
action = np.random.choice(action_dim, p=p)
return action
def optimize_model(memory, policy_net, target_net, optimizer):
if len(memory) < batch_size:
return
transitions = memory.sample(batch_size)
batch = list(zip(*transitions))
state_batch = torch.stack(batch[0])
action_batch = torch.tensor(batch[1]).unsqueeze(1)
reward_batch = torch.tensor(batch[2])
next_state_batch = torch.stack(batch[3])
done_batch = torch.tensor(batch[4], dtype=torch.float32)
q_values = policy_net(state_batch).gather(1, action_batch)
next_q_values = target_net(next_state_batch).max(1)[0].detach()
# DQN
target_q_values = reward_batch + (gamma * next_q_values * (1 - done_batch))
loss = nn.MSELoss()(q_values.squeeze(), target_q_values)
optimizer.zero_grad()
loss.backward()
optimizer.step()
env = gym.make("CartPole-v1")
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
policy_net = DQN(state_dim, action_dim)
target_net = DQN(state_dim, action_dim)
target_net.load_state_dict(policy_net.state_dict())
target_net.eval()
optimizer = optim.Adam(policy_net.parameters(), lr=learning_rate)
memory = ReplayMemory(memory_size)
# epsilon = epsilon_start
episode_rewards = []
episode_reward = 0
save_dir = "dqn_saved_models"
os.makedirs(save_dir, exist_ok=True)
for episode in range(episodes):
state = torch.tensor(env.reset()[0], dtype=torch.float32)
if episode % 100 == 0:
print(f"Episode {episode}, Avg Reward: {episode_reward/100}")
if episode % 100 == 0 :
episode_reward = 0
total_reward = 0
# 500 초과인 경우는 done으로 판단
while total_reward < 501 :
action = select_action(state, target_net, action_dim)
next_state, reward, done, _, _ = env.step(action)
next_state = torch.tensor(next_state, dtype=torch.float32)
memory.push((state, action, reward, next_state, done))
state = next_state
total_reward += reward
optimize_model(memory, policy_net, target_net, optimizer)
if done :
break
# 500점 달성한 모델 저장
if total_reward >= 500 :
model_path = os.path.join(save_dir, f"dqn_model_episode_{episode}.pth")
torch.save(policy_net.state_dict(), model_path)
episode_reward += total_reward
# ϵ-greedy 사용 시, 필요
# if episode % 10 == 0 :
# epsilon = max(epsilon_end, epsilon*epsilon_decay)
if episode % 20 == 0:
target_net.load_state_dict(policy_net.state_dict())
episode_rewards.append(total_reward)
plt.plot(episode_rewards)
plt.xlabel('Episode')
plt.ylabel('Total Reward')
plt.title('DQN on CartPole')
plt.show()
# 테스트 진행
env = gym.make("CartPole-v1", render_mode='human')
# 500 달성한 모델 업로드
model_paths = glob.glob(os.path.join(save_dir, "*.pth"))
model_i = 0
for model_path in model_paths :
policy_net.load_state_dict(torch.load(model_path))
policy_net.eval()
avg_reward = 0
# 각 모델 별 10번 진행
for episode in range(10) :
state = torch.tensor(env.reset()[0], dtype=torch.float32)
total_reward = 0
while total_reward < 501 :
with torch.no_grad() :
action = policy_net(state).argmax().item()
next_state, reward, done, _, _ = env.step(action)
next_state = torch.tensor(next_state, dtype=torch.float32)
state = next_state
total_reward += reward
if done :
break
avg_reward += total_reward
print(f"model {model_i + 1}, Avg Reward: {avg_reward/10}")
model_i += 1
딥러닝+강화학습으로 진행되기 때문에 모델 학습이나 이런 부분이 진행하면서 많이 어려웠습니다.
저도 이거 풀면서 딥러닝에 대한 지식이 부족하다는 것을 깨닫고 요즘은 딥러닝을 공부하고 있는데, 쉽지 않네요ㅠㅠ
DQN이랑 비슷한 DDQN으로 cart pole 문제를 푸는 방법은 아래 링크를 참고해주세요.
Q 값이 제대로 업데이트가 될 때까지충분한 탐험을 진행하지 못했을 경우, 제대로 된 행동을 추출할 수 없다는 것입니다.
예를 들어,초반에는 Q 값이 모두 0이기 때문에(0, 0)에서왼쪽으로 가는 행동만 선택하기 때문에 게임을 진행할 수가 없습니다.
저희는 이 문제를 해결하기 위해,ϵ-greedy방법을 사용할 수 있습니다.
ϵ-greedy란?
탐험과 이용의 균형을 맞추기 위한 행동 선택 방법으로, 아래 공식을 따릅니다.
여기서 ϵ은 0과 1 사이의 값으로ϵ 확률만큼은랜덤하게 행동을 하게 하여탐험을 진행하도록 하고,(1-ϵ)확률 만큼Q 값이 가장 높은 행동을 선택하도록 합니다.
해당 ϵ을 초반에 높게 설정하고 점차 ϵ을 줄임으로써,초반에는 랜덤 행동을 통한 탐험을 하게 하고 점차 Q 값을 이용하도록 행동을 선택할 수 있습니다.
ϵ-greedy를 활용하여 행동을 선택하는 코드는 아래와 같습니다.
# 초기 값은 보통 1로 설정
epsilon = 1.0
train = True
# ϵ-greedy를 활용한 행동 선택
def select_action(state) :
# 훈련을 할 경우에는 ϵ-greedy 방법을 사용
# 테스트를 진행할 때는 온전히 Q 값만 사용
# np.random.rand()를 넣어, 후반에도 종종 탐험을 할 수 있도록 함
if np.random.rand() < epsilon and train :
action = np.random.choice([0, 1, 2, 3])
else :
action = np.argmax(Q[state])
return action
선택한 행동을 SARSA 공식을 사용해서 Q 값 업데이트
해당 부분은 위에서선택한 행동을 환경에서 실행해보고, 그결과 값을 SARSA 공식에 맞게 Q 값을 업데이트하는 것입니다.
코드로 들어가기 전에 먼저Q 테이블을 업데이트하는 공식을 먼저 살펴보겠습니다.
해당 수식은 Q(s, a)를 업데이트 하는데, 특정 학습률 α에 있어(1- α)만큼 현재의 Q 값과α만큼의 (보상값 r + 할인율 γ * 다음 state와 action의 Q값 Q(s', a'))를 반영한다는 의미입니다.
Q-learning을 배우신 분들은 아시겠지만, Q-learning에서의 maxQ값이 특정 행동 a'의 Q 값인 Q(s', a')로 바뀐 것을 알 수 있습니다.
학습률 α
값이 높을수록다음 행동 값 즉,새로운 정보를 더 많이 반영한다는 것이고,낮을수록현재의 Q 값 즉,기존의 경험을 더 많이 유지한다는 의미입니다.
할인율 γ
미래 보상의 중요도를 나타내는 지표로, 보통은 미래의 보상에 너무 의존하지 않도록1보다 약간 작은 수로 지정하는 것이 보통입니다.
Q(s', a')
실제로 선택한 다음 행동 a'에 대한 Q 값으로, 위의 행동 선택을 기반하여 다음 state에서 실제 action을 고른 값입니다.
이렇게 실제 행동을 기반으로 Q 값을 업데이트 하기 때문에, 안정적이지만 그만큼 느릴 수 있습니다.
하지만, frozen lake는 공간이 작은 문제라서 Q-learning과 크게 결과 차이는 없으실 거예요:)
해당 공식을 바탕으로 SARSA를 진행하는 코드는 아래와 같습니다.
# 학습을 진행할 때는 render 모드 비활성화
env = gym.make('FrozenLake-v1', desc=None, map_name=map_size, is_slippery=is_slippery)
env.reset()
# 환경의 행동 범위 : 여기서는 상, 하, 좌, 우 총 4개
action_size = env.action_space.n
# defaultdict은 키가 없을 때 자동으로 기본값을 생성하기 때문에 강화 학습에서 많이 사용
Q = defaultdict(lambda: np.zeros(action_size))
alpha = 0.1
gamma = 0.99
# 총 학습을 진행할 에피소드 수
max_episode = 10000
def learn() :
reward_list = []
for i in range(1, max_episode+1) :
# 100번째 마다 학습이 진행되고 있음을 출력
if i % 100 == 0 :
# 해당 에피소드까지 진행된 모든 보상의 평균을 구함
avg_reward = sum(reward_list)/100
print("\rEpisode {}/{} || average reward {}".format(i, max_episode, avg_reward), end="")
reward_list = []
# 에피소드를 처음 시작할 때 reset
state, _ = env.reset()
done = False
all_reward = 0
# 에피소드가 종료될 때까지 반복
while not done :
# Q 테이블을 바탕으로 action을 고르는 함수
action = select_action(state)
# state, reward, done 외 사용하지 않기 때문에 _ 처리
new_state, reward, done, _, _ = env.step(action)
next_action = select_action(new_state)
# SARSA
Q[state][action] = (1-alpha)*Q[state][action] + alpha*(reward + gamma*Q[new_state][next_action])
all_reward += reward
state = new_state
# 50번째 에피소드 마다 ϵ 값을 줄여줌
if i % 50 == 0 :
epsilon *= 0.99
reward_list.append(all_reward)
위의 두 가지 과정을 합치면 SARSA로 frozen lake를 풀 수 있는 코드가 완성됩니다!
학습 후테스트를 진행하고 싶으신 경우에는render를 킨 환경을 다시 세팅해서 해주시면 됩니다.
전체 코드
행동 선택, 학습, 테스트 과정을 모두 포함한 전체 코드는 아래와 같습니다.
import gymnasium as gym
from collections import defaultdict
import numpy as np
# 미끄러짐 옵션 True/False 선택 가능
is_slippery = True
# 8x8 중에 선택 가능
map_size = '4x4'
env = gym.make('FrozenLake-v1', desc=None, map_name=map_size, is_slippery=is_slippery)
env.reset()
action_size = env.action_space.n
Q = defaultdict(lambda: np.zeros(action_size))
alpha = 0.1
gamma = 0.99
epsilon = 1.0
train = True
max_episode = 100000
def select_action(state) :
if np.random.rand() < epsilon and train :
action = np.random.choice([0, 1, 2, 3])
else :
action = np.argmax(Q[state])
return action
def learn() :
global epsilon
reward_list = []
for i in range(1, max_episode+1) :
# 100번째 마다 학습이 진행되고 있음을 출력
if i % 100 == 0 :
# 해당 에피소드까지 진행된 모든 보상의 평균을 구함
avg_reward = sum(reward_list)/100
print("\rEpisode {}/{} || average reward {}".format(i, max_episode, avg_reward), end="")
reward_list = []
state, _ = env.reset()
done = False
all_reward = 0
while not done :
action = select_action(state)
new_state, reward, done, _, _ = env.step(action)
next_action = select_action(new_state)
# SARSA
Q[state][action] = (1-alpha)*Q[state][action] + alpha*(reward + gamma*Q[new_state][next_action])
all_reward += reward
state = new_state
if i % 50 == 0 :
epsilon *= 0.99
reward_list.append(all_reward)
# 학습한 Q를 바탕으로 frozen lake 테스트
def testing_after_learning():
# render를 켜야 제대로 학습이 되었는지 확인할 수 있음
env = gym.make('FrozenLake-v1', desc=None, map_name=map_size, is_slippery=is_slippery, render_mode='human')
total_test_episode = 10
rewards = []
for episode in range(total_test_episode):
state, _ = env.reset()
episode_reward = 0
while True:
action = select_action(state)
new_state, reward, done, _, _ = env.step(action)
episode_reward += reward
if done:
rewards.append(episode_reward)
break
state = new_state
print("")
print("avg: " + str(sum(rewards) / total_test_episode))
if __name__ == "__main__" :
learn()
testing_after_learning()
테스트를 진행하면서is_slippery 옵션을 껐을 경우에는1.0 보상을 받으면 성공이고,is_slippery 옵션을 켰을 경우에는70% 이상 1.0 보상을 받으면 성공이라고 보실 수 있습니다.
추가로 is_slippery 옵션을 켰을 경우에는 학습을 많이 진행해야 어느 정도 수렴하시는 걸 보실 수 있습니다!
아무래도 model-free로 진행을 하니까 많이 느리더라구요ㅠㅠ
model-based
model-free가 아닌 어느 정도 model-based로 빠르게 학습을 하고 싶으신 경우 아래 상황을 고려할 수 있습니다.
행동 한 번을 진행할 때마다reward에 - 진행 → RL이 최단 경로로 진행하려는 경향을 학습할 수 있음
구멍에 빠졌을 경우,reward에 크게 - 진행 → 구멍에 빠지지 않는 쪽으로 빠르게 학습할 수 있음
도착했을 경우,reward를 크게 추가 → 도착 지점에 확실히 도착하기 위해 큰 reward를 지급
그 외에도 벽에 부딪히거나 하는 등 맵을 알고 있기 때문에 환경에 맞게reward를 추가로 주거나 마이너스를 진행하여,model-based 모델을 만들 수도 있습니다.
그래도 강화 학습을 제대로 알기 위해서는 model-free로 진행해보는 것을 추천드립니다!
Q-learning으로 frozen lake를 풀 때, 크게 두 가지를 생각하시면 됩니다.
Q 값을 바탕으로 행동을 선택
선택한 행동을 Q-learning 공식을 사용해서 Q 값 업데이트
위의 두 가지를 하나씩 자세히 살펴보겠습니다.
Q 값을 바탕으로 행동을 선택
해당 부분은 현재까지 업데이트 된 Q 값을 바탕으로 행동을 선택하는 것입니다.
기본적으로는 Q 값이 가장 높은 행동을 선택하면 됩니다.
하지만 여기에는 한 가지 문제점이 있습니다.
Q 값이 제대로 업데이트가 될 때까지 충분한 탐험을 진행하지 못했을 경우, 제대로 된 행동을 추출할 수 없다는 것입니다.
예를 들어, 초반에는 Q 값이 모두 0이기 때문에 (0, 0)에서 왼쪽으로 가는 행동만 선택하기 때문에 게임을 진행할 수가 없습니다.
저희는 이 문제를 해결하기 위해, ϵ-greedy 방법을 사용할 수 있습니다.
ϵ-greedy란?
탐험과 이용의 균형을 맞추기 위한 행동 선택 방법으로, 아래 공식을 따릅니다.
여기서 ϵ은 0과 1 사이의 값으로 ϵ 확률 만큼은 랜덤하게 행동을 하게 하여 탐험을 진행하도록 하고, (1-ϵ) 확률 만큼 Q 값이 가장 높은 행동을 선택하도록 합니다.
해당 ϵ을 초반에 높게 설정하고 점차 ϵ을 줄임으로써, 초반에는 랜덤 행동을 통한 탐험을 하게 하고 점차 Q 값을 이용하도록 행동을 선택할 수 있습니다.
ϵ-greedy를 활용하여 행동을 선택하는 코드는 아래와 같습니다.
# 초기 값은 보통 1로 설정
epsilon = 1.0
train = True
# ϵ-greedy를 활용한 행동 선택
def select_action(state) :
# 훈련을 할 경우에는 ϵ-greedy 방법을 사용
# 테스트를 진행할 때는 온전히 Q 값만 사용
# np.random.rand()를 넣어, 후반에도 종종 탐험을 할 수 있도록 함
if np.random.rand() < epsilon and train :
action = np.random.choice([0, 1, 2, 3])
else :
action = np.argmax(Q[state])
return action
선택한 행동을 Q-learning 공식을 사용해서 Q 값 업데이트
해당 부분은 위에서 선택한 행동을 환경에서 실행해보고, 그 결과 값을 Q-learning 공식에 맞게 Q 값을 업데이트 하는 것입니다.
코드로 들어가기 전에 먼저 Q 테이블을 업데이트하는 공식을 먼저 살펴보겠습니다.
해당 수식은 Q(s, a)를 업데이트 하는데, 특정 학습률 α에 있어 (1- α)만큼 현재의 Q 값과 α만큼의 (보상값 r + 할인율 γ * 다음 state의 가장 높은 Q값 maxQ(s', a'))를 반영한다는 의미입니다.
학습률 α
값이 높을수록 다음 행동 값 즉, 새로운 정보를 더 많이 반영한다는 것이고, 낮을수록 현재의 Q 값 즉, 기존의 경험을 더 많이 유지한다는 의미입니다.
할인율 γ
미래 보상의 중요도를 나타내는 지표로, 보통은 미래의 보상에 너무 의존하지 않도록 1보다 약간 작은 수로 지정하는 것이 보통입니다.
maxQ(s', a')
다음 상태인 s'에서 가능한 모든 행동 중 가장 높은 Q 값을 의미하며, s'은 현재 state에서 위에서 고른 행동을 실행한 결과 값이라고 보시면 됩니다.
이제 해당 공식을 바탕으로 Q-learning을 하는 코드는 아래와 같습니다.
# 학습을 진행할 때는 render 모드 비활성화
env = gym.make('FrozenLake-v1', desc=None, map_name=map_size, is_slippery=is_slippery)
env.reset()
# 환경의 행동 범위 : 여기서는 상, 하, 좌, 우 총 4개
action_size = env.action_space.n
# defaultdict은 키가 없을 때 자동으로 기본값을 생성하기 때문에 강화 학습에서 많이 사용
Q = defaultdict(lambda: np.zeros(action_size))
alpha = 0.1
gamma = 0.99
# 총 학습을 진행할 에피소드 수
max_episode = 10000
def learn() :
reward_list = []
for i in range(1, max_episode+1) :
# 100번째 마다 학습이 진행되고 있음을 출력
if i % 100 == 0 :
# 해당 에피소드까지 진행된 모든 보상의 평균을 구함
avg_reward = sum(reward_list)/100
print("\rEpisode {}/{} || average reward {}".format(i, max_episode, avg_reward), end="")
reward_list = []
# 에피소드를 처음 시작할 때 reset
state, _ = env.reset()
done = False
all_reward = 0
# 에피소드가 종료될 때까지 반복
while not done :
# Q 테이블을 바탕으로 action을 고르는 함수
action = select_action(state)
# state, reward, done 외 사용하지 않기 때문에 _ 처리
new_state, reward, done, _, _ = env.step(action)
# Q-learning 공식
Q[state][action] = (1-alpha)*Q[state][action] + alpha*(reward + gamma*np.max(Q[new_state]))
all_reward += reward
state = new_state
# 50번째 에피소드 마다 ϵ 값을 줄여줌
if i % 50 == 0 :
epsilon *= 0.99
reward_list.append(all_reward)
위의 두 가지 과정을 합치면 Q-learing으로 frozen lake를 풀 수 있는 코드가 완성됩니다!
학습 후 테스트를 진행하고 싶으신 경우에는 render를 킨 환경을 다시 세팅해서 해주시면 됩니다.
전체 코드
행동 선택, 학습, 테스트 과정을 모두 포함한 전체 코드는 아래와 같습니다.
import gymnasium as gym
from collections import defaultdict
import numpy as np
# 미끄러짐 옵션 True/False 선택 가능
is_slippery = True
# 8x8 중에 선택 가능
map_size = '4x4'
env = gym.make('FrozenLake-v1', desc=None, map_name=map_size, is_slippery=is_slippery)
env.reset()
action_size = env.action_space.n
Q = defaultdict(lambda: np.zeros(action_size))
alpha = 0.1
gamma = 0.99
epsilon = 1.0
train = True
max_episode = 100000
def select_action(state) :
if np.random.rand() < epsilon and train :
action = np.random.choice([0, 1, 2, 3])
else :
action = np.argmax(Q[state])
return action
def learn() :
global epsilon
reward_list = []
for i in range(1, max_episode+1) :
# 100번째 마다 학습이 진행되고 있음을 출력
if i % 100 == 0 :
# 해당 에피소드까지 진행된 모든 보상의 평균을 구함
avg_reward = sum(reward_list)/100
print("\rEpisode {}/{} || average reward {}".format(i, max_episode, avg_reward), end="")
reward_list = []
state, _ = env.reset()
done = False
all_reward = 0
while not done :
action = select_action(state)
new_state, reward, done, _, _ = env.step(action)
Q[state][action] = (1-alpha)*Q[state][action] + alpha*(reward + gamma*np.max(Q[new_state]))
all_reward += reward
state = new_state
if i % 50 == 0 :
epsilon *= 0.99
reward_list.append(all_reward)
# 학습한 Q를 바탕으로 frozen lake 테스트
def testing_after_learning():
# render를 켜야 제대로 학습이 되었는지 확인할 수 있음
env = gym.make('FrozenLake-v1', desc=None, map_name=map_size, is_slippery=is_slippery, render_mode='human')
total_test_episode = 10
rewards = []
for episode in range(total_test_episode):
state, _ = env.reset()
episode_reward = 0
while True:
action = select_action(state)
new_state, reward, done, _, _ = env.step(action)
episode_reward += reward
if done:
rewards.append(episode_reward)
break
state = new_state
print("")
print("avg: " + str(sum(rewards) / total_test_episode))
if __name__ == "__main__" :
learn()
testing_after_learning()
테스트를 진행하면서 is_slippery 옵션을 껐을 경우에는 1.0 보상을 받으면 성공이고, is_slippery 옵션을 켰을 경우에는 70% 이상 1.0 보상을 받으면 성공이라고 보실 수 있습니다.
추가로 is_slippery 옵션을 켰을 경우에는 학습을 많이 진행해야 어느 정도 수렴하시는 걸 보실 수 있습니다!
아무래도 model-free로 진행을 하니까 많이 느리더라구요ㅠㅠ
model-based
model-free가 아닌 어느 정도 model-based로 빠르게 학습을 하고 싶으신 경우 아래 상황을 고려할 수 있습니다.
행동 한 번을 진행할 때마다 reward에 - 진행 → RL이 최단 경로로 진행하려는 경향을 학습할 수 있음
구멍에 빠졌을 경우, reward에 크게 - 진행 → 구멍에 빠지지 않는 쪽으로 빠르게 학습할 수 있음
도착했을 경우, reward를 크게 추가 → 도착 지점에 확실히 도착하기 위해 큰 reward를 지급
그 외에도 벽에 부딪히거나 하는 등 맵을 알고 있기 때문에 환경에 맞게 reward를 추가로 주거나 마이너스를 진행하여, model-based 모델을 만들 수도 있습니다.
그래도 강화 학습을 제대로 알기 위해서는 model-free로 진행해보는 것을 추천드립니다!
Q-learning이랑 비슷한 SARSA로 frozen lake 문제를 푸는 방법은 아래 링크를 참고해주세요.